
【導讀】我們將簡(jiǎn)要介紹柵極驅動(dòng)器的概念并詳細解釋隔離式和非隔離式柵極驅動(dòng)器的本質(zhì)特征。我們還將學(xué)習隔離式柵極驅動(dòng)器的一些關(guān)鍵優(yōu)勢。
什么是柵極驅動(dòng)器?
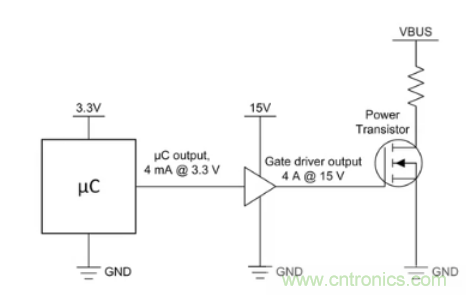
簡(jiǎn)單來(lái)說(shuō),柵極驅動(dòng)器是一個(gè)用于放大來(lái)自微控制器或其他來(lái)源的低電壓或低電流的緩沖電路。在某些情況下,例如驅動(dòng)用于數字信號傳輸的邏輯電平晶體管時(shí),使用微控制器輸出不會(huì )損害應用的效率、尺寸或熱性能。在高功率應用中,微控制器輸出通常不適合用于驅動(dòng)功率較大的晶體管。
但是為什么要使用微控制器來(lái)驅動(dòng)功率晶體管呢?為了更好地回答這個(gè)問(wèn)題,我們來(lái)考慮一下大型的應用。開(kāi)關(guān)電源是幾乎每一個(gè)現代電氣系統的核心。任何插到壁式插座上的設備都可以利用開(kāi)關(guān)電源來(lái)進(jìn)行功率因數校正和生成直流電流軌。汽車(chē)系統使用開(kāi)關(guān)電源來(lái)維持電池、馬達和充電器等系統。電網(wǎng)基礎設施要求高效率地轉換直流太陽(yáng)能電池板提供的開(kāi)關(guān)電能,從而將電能傳輸到直流存儲系統和交流電網(wǎng)。
由于應用中存在大量拓撲且復雜性日益升高,對于高功率晶體管陣列,現代開(kāi)關(guān)電源通常使用微控制器或其他ASIC來(lái)協(xié)調其開(kāi)關(guān),以滿(mǎn)足精確的開(kāi)關(guān)計時(shí)要求。這可能會(huì )帶來(lái)挑戰,因為大多數微控制器輸出并沒(méi)有針對驅動(dòng)功率晶體管進(jìn)行優(yōu)化。
高功率晶體管與模擬信號鏈或數字邏輯電路中的其他晶體管的特性幾乎完全不同。功率晶體管的擊穿電壓的分布范圍極大,從大約40伏到1,200伏甚至更高。由于需要實(shí)現較高的漏極電路和較低的導通損耗,漏源電阻需要低至幾十毫歐姆甚至更小。與漏源電阻成反比的柵極電容通常超過(guò)10,000pF。柵極驅動(dòng)電壓和電流要求在很大程度上取決于晶體管結構和漏極電流額定值,其常見(jiàn)值在8至30伏和1至5安培之間。高噪聲環(huán)境甚至可能需要雙極輸出驅動(dòng)。

與頻率為幾十或幾百兆赫的信號鏈或數字晶體管相比,傳統高功率晶體管的頻率上限只有幾百千赫,隨著(zhù)新技術(shù)的出現,有可能會(huì )將該上限推高一個(gè)數量級。這種頻率限制是由于增高的柵極電容和驅動(dòng)電壓要求造成的。電容器的能量等于1/2乘以電容再乘以電壓的平方。柵極電容的充放電功耗等于電容器的能量乘以頻率的兩倍--一次充電,一次放電。具有15納法柵極電容的功率晶體管在200千赫、12伏方波驅動(dòng)條件下需要近半瓦的功耗。對于可傳輸3至5千瓦電力的轉換器,提高開(kāi)關(guān)頻率所帶來(lái)的好處,比如減小磁體的尺寸和重量,有時(shí)要比幾瓦驅動(dòng)損耗的成本更有價(jià)值。
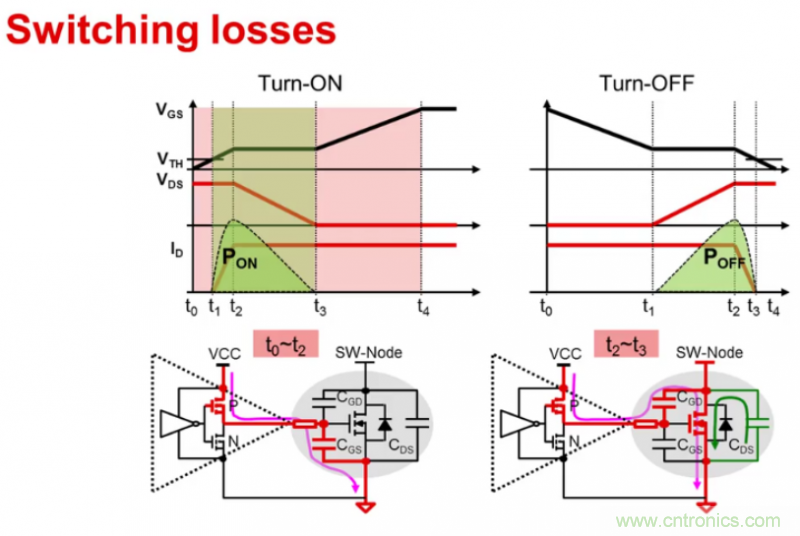
在決定晶體管的驅動(dòng)要求的元素中,還有一種更為棘手的損耗源。在柵極電容充放電過(guò)程中,開(kāi)關(guān)會(huì )在全開(kāi)和全關(guān)狀態(tài)之間存在一個(gè)過(guò)渡期,此時(shí)開(kāi)關(guān)上會(huì )出現電壓,且會(huì )有電流流過(guò)開(kāi)關(guān)。由于同時(shí)存在較高的電壓和較高的電流,因此這類(lèi)開(kāi)關(guān)損耗會(huì )造成相當大的功耗,有時(shí)會(huì )達到幾十瓦,以及進(jìn)一步的效率降級。因此,通過(guò)更快地對柵極電容進(jìn)行充放電來(lái)縮短過(guò)渡期的持續時(shí)間是有好處的。
如果輸出電壓甚至高到足以使晶體管導通,那么大多數微控制器提供的低電流信號在驅動(dòng)高功率晶體管時(shí)都會(huì )慢得令人發(fā)指,效率極低。

現在我們來(lái)回答什么是柵極驅動(dòng)器這個(gè)問(wèn)題,柵極驅動(dòng)器是一個(gè)用于放大來(lái)自微控制器或其他來(lái)源的控制信號,從而使其適應半導體開(kāi)關(guān)的有效和高效運行的電路。
有許多柵極驅動(dòng)器都可以在承受高偏置電壓的情況下工作,例如高功率轉換器中使用的那些。
柵極驅動(dòng)器分類(lèi)與優(yōu)點(diǎn)分析
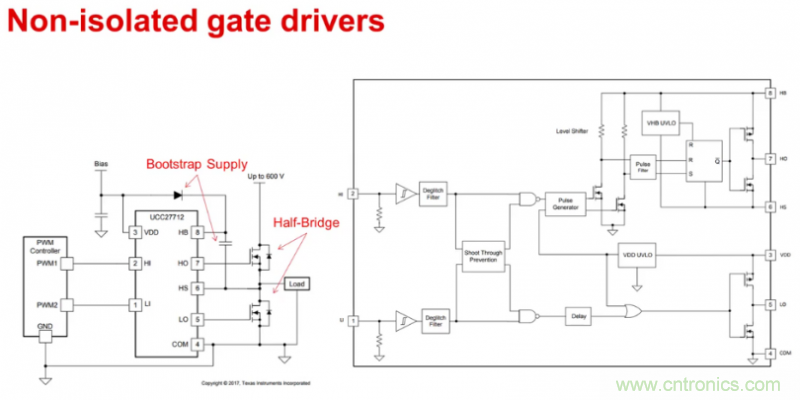
廣義地說(shuō),這些柵極驅動(dòng)器分為兩類(lèi):非隔離式柵極驅動(dòng)器和隔離式柵極驅動(dòng)器。大多數用于在高電壓下運行的非隔離式柵極驅動(dòng)器都是半橋驅動(dòng)器。
半橋驅動(dòng)器旨在驅動(dòng)以半橋配置堆疊在一起的功率晶體管。它們有兩個(gè)通道:低側和高側。低側是一個(gè)相當簡(jiǎn)單的緩沖器,通常與控制輸入具有相同的接地點(diǎn)。而高側則是經(jīng)過(guò)精心設計且以半橋的開(kāi)關(guān)節點(diǎn)為基準,從而允許使用兩個(gè)N溝道MOSFET或兩個(gè)IGBT。開(kāi)關(guān)節點(diǎn)應該在高電壓總線(xiàn)和電源接地之間快速過(guò)渡,從而讓我們有機會(huì )以具有成本效益的方式利用與為低側供電時(shí)相同的電源通過(guò)自舉電路為高側供電。為了傳達輸出應為高電平還是低電平,必須包含一個(gè)高電壓電平轉換器,該轉換器的泄漏電流通常較小,只有幾微安或更小。

這種類(lèi)型的柵極驅動(dòng)器具有很多局限性。首先,因為它整體都在同一硅片上,因此,無(wú)法超出硅的工藝極限。大多數非隔離式柵極驅動(dòng)器的工作電壓都不超過(guò)700伏。第二,電平轉換器必須承受高電壓運行的壓力,且必須在高噪聲環(huán)境中傳達輸出狀態(tài)。因此,為了實(shí)現充足的噪聲濾波,電平轉換器通常會(huì )添加一些傳播延遲。然后,低側的驅動(dòng)器又要與高側驅動(dòng)器的較長(cháng)延遲相匹配。第三,用于在高電壓下運行的非隔離式柵極驅動(dòng)器不夠靈活?,F在存在許多復雜的拓撲,它們要求多個(gè)輸出能夠轉換至控制公共端電平以上或以下。
在現代柵極驅動(dòng)器中越來(lái)越常見(jiàn)的特性是在輸入和輸出電路之間集成了隔離層。這些器件將一個(gè)硅片用于控制信號,另一個(gè)用于輸出驅動(dòng)信號,并通過(guò)距離和絕緣材料對其進(jìn)行物理隔離??刂菩盘栐趥鬏斶^(guò)程中可通過(guò)多種方式穿過(guò)隔離層,但是,與非隔離式柵極驅動(dòng)器不同的是,隔離層可防止任何顯著(zhù)的泄漏電流從隔離層的一側流向另一側。由于一個(gè)輸入裸片可與多個(gè)輸出裸片隔離,而輸出裸片之間又可以彼此隔離,因此輸出公共端可以自由地從輸入公共端或其他輸出公共端向上偏移,直至達到隔離技術(shù)的極限。
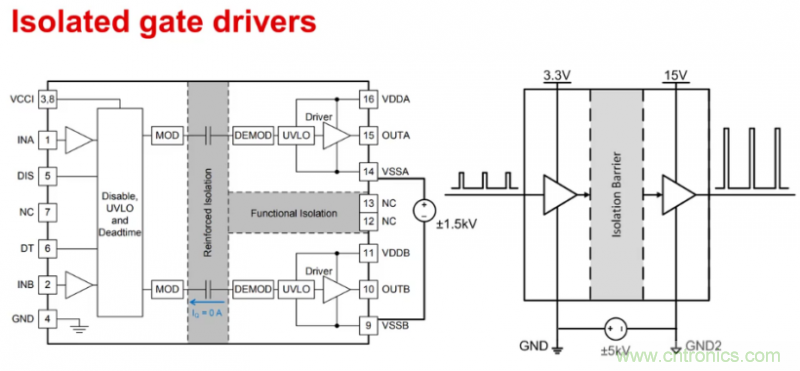
與具有不靈活的電平轉換器和預定輸出角色的非隔離式柵極驅動(dòng)器不同的是,隔離式柵極驅動(dòng)器的輸出可以以電路中的任何節點(diǎn)為基準,且可以構造為單通道或雙通道器件。隔離技術(shù)的極限遠遠高于非隔離式柵極驅動(dòng)器的硅工藝限制,可提供耐受力高于5千伏的隔離層。除了提高電壓上限和靈活性之外,隔離式柵極驅動(dòng)器還可以用于實(shí)現更快速、更穩健的運行。使用隔離的原因有很多。許多應用都因為監管要求而需要使用隔離式電源,并且隔離式柵極驅動(dòng)器可以用來(lái)簡(jiǎn)化系統結構。有時(shí),隔離層的強度還可以用來(lái)增強系統抵抗浪涌、雷擊和其他有可能損壞系統的異常事件的能力。
在其他情況下,通過(guò)靈活地使用隔離層可以簡(jiǎn)化拓撲的設計,從而無(wú)需再使用信號轉換器或電平轉換器,如反相降壓/升壓。即使是在并不嚴格要求進(jìn)行隔離的傳統半橋應用中,隔離式柵極驅動(dòng)器也可以憑借優(yōu)異的傳播延遲、較高的驅動(dòng)力和對高電壓瞬態(tài)的更出色承受力而勝過(guò)非隔離式柵極驅動(dòng)器。

使用隔離式柵極驅動(dòng)器的常用拓撲包括牽引逆變器、電機驅動(dòng)器、三相功率因數校正電路和串式光伏逆變器。這些拓撲都在交流和直流電源之間轉換,直接與高電壓直流總線(xiàn)和電機或電網(wǎng)等三相系統相連。
推薦閱讀:




